ov_hloc
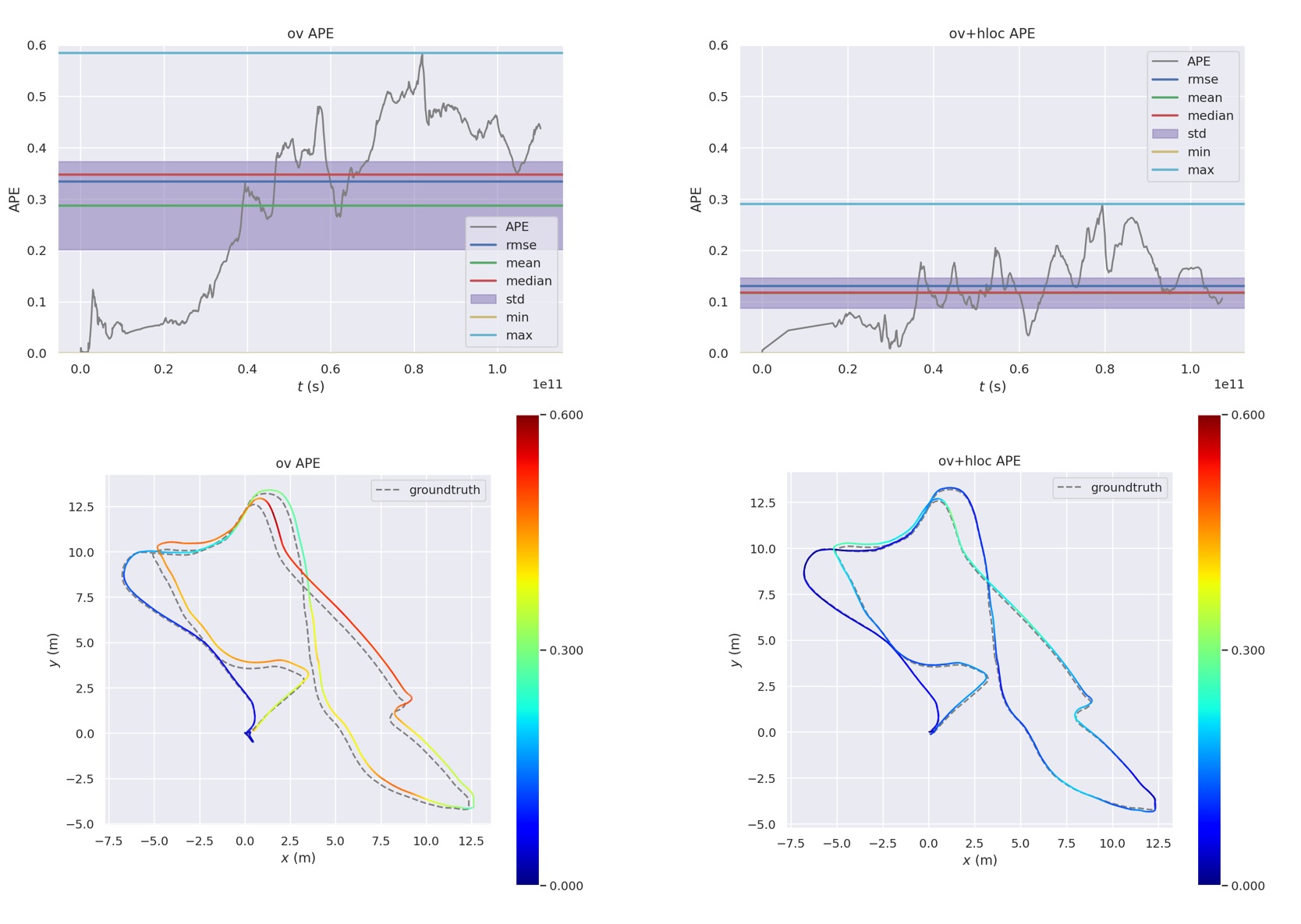
Using Hierarchical-Localization (opens in a new tab) instead of DBoW2 for loop closure. This was originally part of my undergraduate final project, where I worked on improving the loop closure module of VINS-Fusion. I found it just right for providing a loosely coupled pose graph for OpenVINS (opens in a new tab).

Thanks to the excellent global pose graph optimization provided by VINS-Fusion, this project performs well on the EuRoC dataset.
In the application scenario you can use COLMAP to build SfM maps (using SuperPoint and NetVLAD). The use of a priori maps can give you more accurate positioning results and no accumulative errors.
Here's a simple video (opens in a new tab) of it working with VINS-Fusion. See more on GitHub (opens in a new tab).